
 한국어
한국어 中文
中文Zhrnutie
Vzhľadom na problémy, ktoré existujú v konvenčnej technológii hromadnej technológie pre miešanie cementu a pôdy, ako je nerovnomerná distribúcia sily tela pilotov, veľké poruchy konštrukcie a veľký vplyv na kvalitu hromady ľudskými faktormi, bola vyvinutá nová technológia digitálneho mikro-osi digitálneho mikro-osi digitálneho mikro-osi DMP. V tejto technológii môžu štyri vŕtacie kúsky nastriekať kal a plyn súčasne a pracovať s viacerými vrstvami rezaných čepelí s premenlivým uhlom na prerezanie pôdy počas procesu tvorby hromady. Doplnený procesom postrekovania konverzie nadol, rieši problém nerovnomerného rozdelenia pevnosti tela pilotov a môže účinne znížiť spotrebu cementu. S pomocou medzery vytvorenej medzi špeciálnym vŕtacím potrubím a pôdou sa suspenzia prepúšťa autonómne, čo počas procesu výstavby dosahuje mierne narušenie pôdy okolo hromady. Digitálny riadiaci systém realizuje automatizovanú konštrukciu tvorby pilotov a môže monitorovať, zaznamenávať a poskytovať včasné varovanie pre proces tvorby hromady v reálnom čase.
Zavedenie
Miešanie cementu a pôdy sa široko používajú v oblasti inžinierskej konštrukcie: ako je posilnenie pôdy a vodotesné záclony v základných projektoch; výstuž otvoru v tuneloch štítu a jamiek potrubia; zakladanie slabých pôdnych vrstiev; Anti-Seepage in Water Conservancy Projektuje múry, ako aj prekážky na skládkach a ďalšie. V súčasnosti, keď sa rozsah projektov zväčšuje a väčší, požiadavky na stavebnú efektívnosť a ochranu environmentálnej ochrany zmesí cementu a pôdy sa stali vyššie a vyššími. Okrem toho, aby sa splnili čoraz zložitejšie požiadavky na ochranu životného prostredia okolo projektovej výstavby, musí sa kontrolovať kvalita výstavby hromád cementu a pôdy. A zníženie vplyvu výstavby na okolité prostredie sa stalo naliehavou potrebou.
Konštrukcia miešacích hromád sa používa hlavne bitom vŕtačky na zmiešanie cementu a pôdy in situ, aby vytvorila hromadu s určitou silou a výkonom anti-uznania. Bežne používané hromady miešania cementu a pôdy zahŕňajú jednoosovú os, dvojosú, trojosovú a päťosovú cementovú a pôdnu miešanie. Tieto typy miešaných hromád majú tiež rôzne procesy postrekovania a miešania.
Jednoosová miešavacia hromada má iba jedno vŕtacie potrubie, spodná časť je nastriekaná a miešanie sa vykonáva cez malý počet čepelí. Toto je obmedzené počtom vŕtacích potrubí a miešacích čepeľ a účinnosť práce je relatívne nízka;
Hromadná hromada miešania sa skladá z 2 vŕtacích potrubí, so samostatnou kalistickou rúrkou v strede na injektáž. Dve vŕtacie potrubia nemajú funkciu injektáže, pretože vŕtacie kúsky na oboch stranách sa musia opakovane premiešať, aby sa suspenzia postriekala zo strednej kalovej rúrky v rozsahu roviny. Distribúcia je rovnomerná, takže počas konštrukcie dvojitého hriadeľa je potrebný proces „dvoch sprejov a troch miešaných“, ktorý obmedzuje stavebnú účinnosť dvojitého hriadeľa a rovnomernosť tvorby pilotov je tiež relatívne zlá. Maximálna hĺbka výstavby je asi 18 metrov [1];
Trojosová miešavacia hromada obsahuje tri vŕtacie potrubia, pričom na obidvoch stranách je nastriekaná šatka a v strede vystriekaný stlačený vzduch. Toto usporiadanie spôsobí, že sila strednej hromady bude menšia ako sila oboch strán a telo hromady bude mať na rovine slabé väzby; Okrem toho je použitý vodný cement, ktorý je použitý vodný cement, relatívne veľký, čo do určitej miery znižuje pevnosť tela hromady;
Päťosová hromada miešania je založená na dvoch osi a troch osi, čím sa zvyšuje počet miešaných čepelí [2-3], zvyšuje počet zmiešajúcich čepelí [2-3]. Proces postrekovania a miešania sa líši od prvých dvoch. Nie je žiadny rozdiel.
Porucha okolitej pôdy počas výstavby zmesi cementových pôdnych zmesí je spôsobené hlavne stlačením a praskaním pôdy spôsobeného miešaním miešaných čepelí a penetráciou a rozdelením cementovej slaní [4-5]. Kvôli veľkému narušeniu spôsobeným výstavbou konvenčných hromád miešania, keď konštrukcia v citlivých prostrediach, ako sú susedné mestské zariadenia a chránené budovy, je zvyčajne potrebné používať drahšie všestranné vysokotlakové dýzové šliapanie (MJS metóda) alebo moniká s jednou osou (metóda IMS) a iné mikro-značky. Rušivé metódy konštrukcie.
Okrem toho počas výstavby konvenčných hromád miešania sú kľúčové konštrukčné parametre, ako je potopenie a rýchlosť zdvíhania vŕtacej rúry a množstvo brokovnice, úzko súvisia so skúsenosťami operátorov. To tiež sťažuje sledovanie procesu výstavby miešaných hromád a vedie k rozdielom v kvalite hromád.
Aby sa vyriešili problémy konvenčných hromád premiešania cementu a pôdy, ako je nerovnomerná distribúcia sily hromady, veľké narušenie konštrukcie a mnoho ľudských interferenčných faktorov, vyvinula inžinierska komunita v Šanghaji novú technológiu štvorosovej hromadnej hromadnej technológie pre miešanie štvorsov. Tento článok podrobne predstaví charakteristiky a účinky inžinierskej aplikácie vplyvu štvorosovej technológie hromadnej technológie v technológii miešania betónov, riadenia narušenia konštrukcie a automatizovanej konštrukcie.
1 、 DMP Digital Micro-Perturbácia štvorosových zariadení pre miešanie
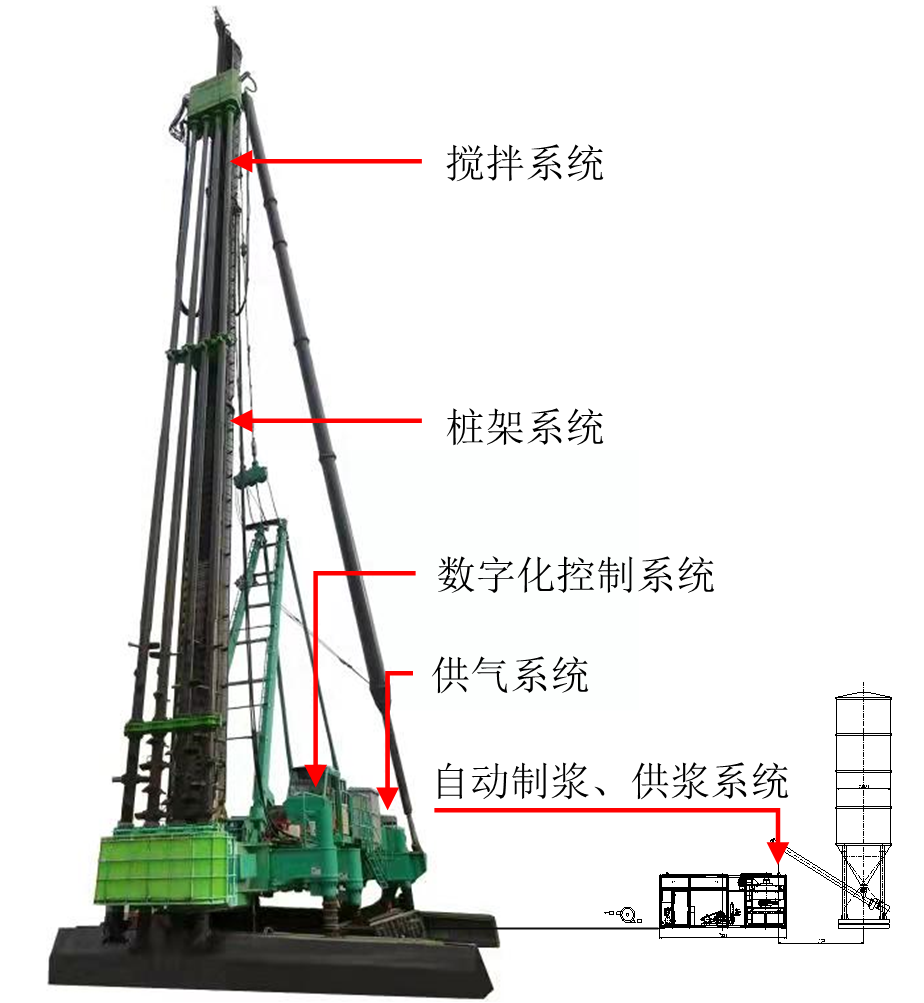
Zariadenie DMP-I Digital Micro-Pertubbation Four-Is Mixis Mixova vodiča sa skladá hlavne z miešacieho systému, systému hromadného rámu, systému na prívod plynu, automatického systému na prerupenie a napájanie dužiny a digitálneho riadiaceho systému na realizáciu automatizovanej konštrukcie hromady.
2 、 Proces miešania a postrekovania
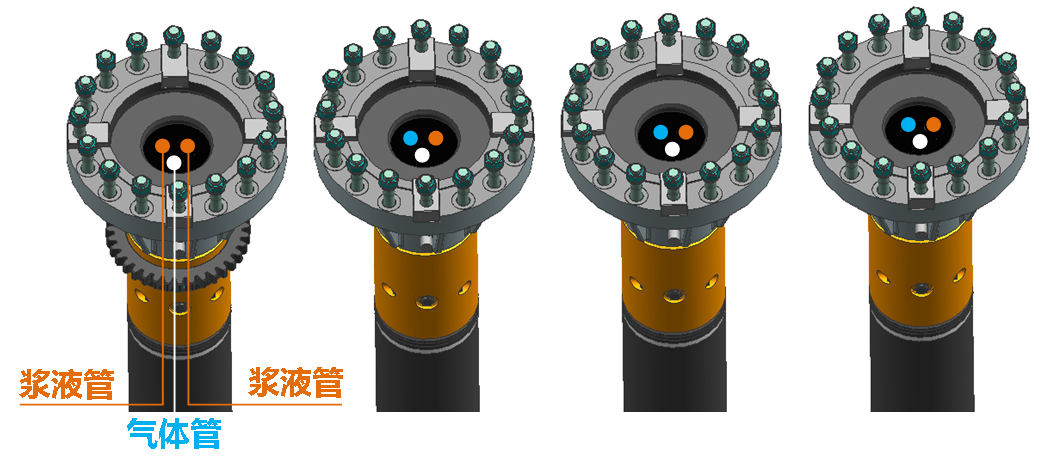
Štyri vŕtacie potrubia sú vybavené brokovnými potrubiami a prúdovými potrubím vo vnútri. Ako je znázornené na obrázku 2, vŕtačka môže nastriekať suspenziu a stlačený vzduch súčasne počas procesu formovania hromady, čím sa zabráni problémom spôsobeným postrekovaním niektorých vŕtacích potrubí a postrekovaním niektorých vŕtacích potrubí. Problém nerovnomerného rozdelenia sily hromady v rovine; Pretože každé vŕtacie potrubie má zásah stlačeného vzduchu, odpor s miešaním sa môže úplne znížiť, čo je užitočné pre výstavbu v tvrdších pôdnych vrstvách a piesočnatej pôde a môže vytvárať zmes cementu a pôdy. Okrem toho môže stlačený vzduch urýchliť proces karbonation Cement and Pôda a zlepšiť včasnú pevnosť cementu a pôdy v miešacej hromade.
Miešacie vŕtacie vrtáky digitálneho mikro-osi štvorosového pilotového ovládača DMP-I sú vybavené 7 vrstvami lopatiek s premenlivým uhlom. Počet jednobodových zmiešaní pôdy môže dosiahnuť 50-krát, čo je ďaleko presahujúce 20-krát odporúčané špecifikáciou; Bit vŕtania miešania je vybavený diferenciálnymi čepeľami, ktoré sa počas procesu tvorby pilotov neotávajú vŕtacou rúrkou, čo môže účinne zabrániť tvorbe hlinených bahnov. To môže nielen zvýšiť počet časov miešania pôdy, ale tiež zabrániť tvorbe veľkých pôdnych hrudiek počas procesu miešania, čím sa zabezpečí rovnomernosť suspenzie v pôde.
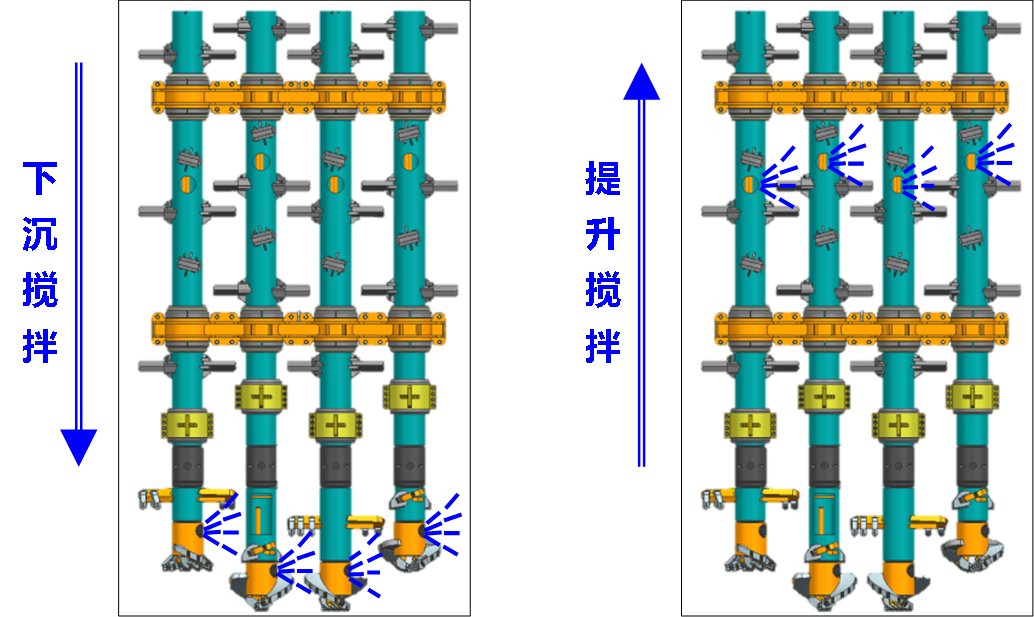
DMP-I Digitálna mikro-perturbácia štvorosová hromada miešania sa prijíma technológia konverzie na konverzii, ako je znázornené na obrázku 3. Na hlave vŕtacej hlavy miešania sú dve vrstvy brokovnických portov. Keď klesá, dolný port výstrelu sa otvorí. Nastriekaná kaša je úplne zmiešaná s pôdou pod pôsobením hornej miešacej čepele. Keď je zdvihnutý, spodný betónový port je zatvorený a zároveň otvorte horný port Gunite, takže kal vyhodený z horného portu Gunite sa môže úplne zmiešať s pôdou pod pôsobením dolných čepelí. Týmto spôsobom je možné v celom procese potápania a miešania úplne miešané kal a pôda, čo ďalej zvyšuje rovnomernosť cementu a pôdy v hĺbkovom rozsahu tela pilotov a účinne rieši problém dvojitých osi a technológie miešania pilotov v vŕtaní. Problém je v tom, že kaša postriekaná zo spodného vstrekovacieho portu nemožno úplne miešané miešajúcimi čepeľami.
3 、 Ovládanie výstavby mikro-distribúcie
Prierez vŕtacej potrubia digitálneho mikro-osi štvorosovej pilotovej piloty DMP-I je oválny tvar podobný špeciálnemu tvaru. Keď sa vŕtacie potrubie otáča, klesá alebo zdvíha, okolo vŕtacej rúrky sa vytvorí výtok a výfukový kanál. Keď za stáleho miešania, keď vnútorný tlak pôdy presahuje napätie v situácii, suspenzia sa prirodzene vypúšťa pozdĺž výtoku kalu okolo vŕtacieho potrubia, čím sa zabráni stlačeniu pôdy spôsobenej akumuláciou tlaku plynových plynov v blízkosti miešačného vŕtania.
Digitálny mikro-osi digitálny mikro-os digitálneho mikro-osi DMP-I je vybavený systémom monitorovania podzemného tlaku na bit vŕtania, ktorý monitoruje zmeny v podzemnom tlaku v reálnom čase počas celého procesu tvorby hromady a zaisťuje, že podzemný tlak je regulovaný v rámci primeraného rozsahu úpravou tlaku plynu kalu. Súčasne môžu nakonfigurované diferenciálne čepele účinne zabrániť priľnutiu hliny k vŕtacej rúrke a tvorbe bahenných guličiek a tiež účinne znížiť odolnosť proti miešaniu a narušenia pôdy.
4 、 Inteligentná kontrola výstavby
Zariadenie DMP-I Digital Micro-Pertubbation Four-Is Michate Maching Driver Equipment je vybavené digitálnym riadiacim systémom, ktorý dokáže realizovať automatizovanú konštrukciu pilotov, parametre procesu výstavby záznamu v reálnom čase a monitorovať a poskytovať včasné varovanie počas procesu tvorby hromady.
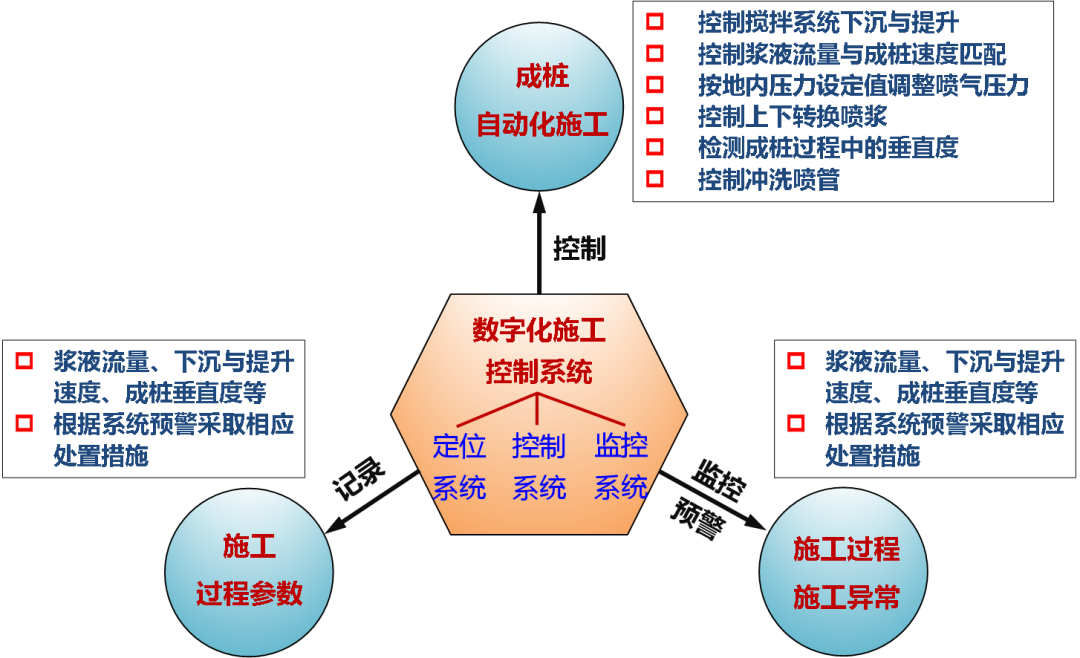
Digitálny riadiaci systém môže automaticky dokončiť konštrukciu miešaných hromád na základe konštrukčných parametrov určených skúšobnými hromadami. Môže automaticky ovládať potápanie a zdvíhanie miešacieho systému, porovnávanie prietoku kalu a rýchlosť tvorby pilotov v sekciách podľa distribúcie vertikálnej pôdnej vrstvy, upravte tlak prúdu podľa stanovenej hodnoty tlaku terénu a procesy riadenia konštrukcie, ako je konverzia štrku spreju. To výrazne znižuje vplyv ľudských faktorov na kvalitu výstavby hromady miešania počas procesu výstavby a zlepšuje spoľahlivosť a konzistentnosť kvality miešania hromady.
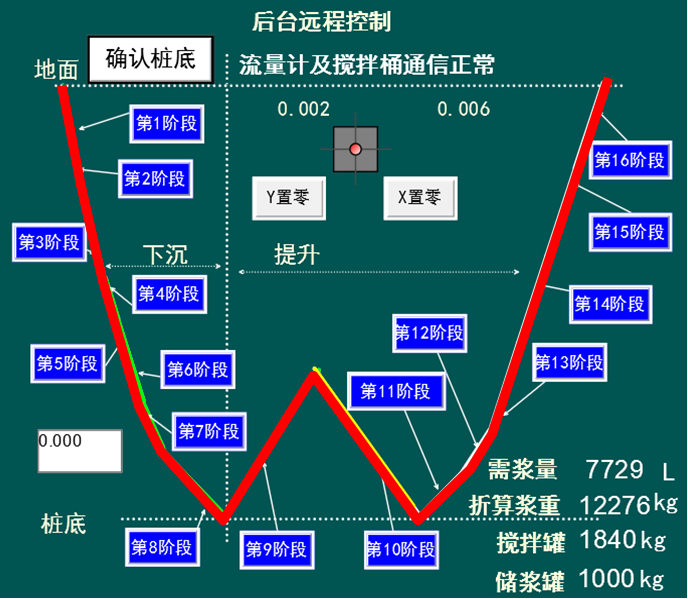
S pomocou presných senzorov nainštalovaných na zariadení môže digitálny riadiaci systém monitorovať kľúčové konštrukčné parametre, ako je rýchlosť miešania, objem postrek, tlak kalu a tok a podzemný tlak, a môže poskytnúť včasné varovanie pre abnormálne stavebné podmienky, čím sa zvýši bezpečnosť procesu výstavby miešania. Transparentnosť a včasnosť riešenia problémov. Zároveň môže systém digitálneho riadenia zaznamenať parametre celého procesu výstavby a nahrať zaznamenané konštrukčné parametre do cloudovej platformy v reálnom čase prostredníctvom sieťového modulu pre ľahké prezeranie a kontrolu, čím sa zabezpečí pravosť a bezpečnosť údajov generovaných počas procesu výstavby.
5 、 stavebná technológia a parametre
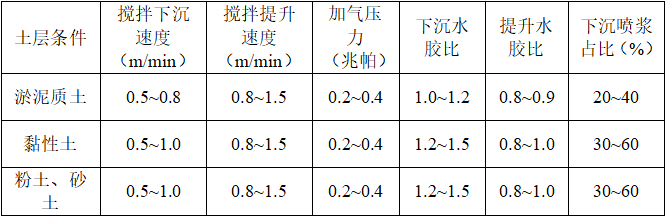
Digitálny mikro-disrbdanský digitálny mikro-osi digitálny mikro-osi štvorosový proces konštrukcie hromady hromady zahŕňa hlavne prípravu výstavby, konštrukciu skúšok a formálnu konštrukciu hromady. Podľa stavebných parametrov získaných z konštrukcie skúšobnej hromady si systém riadenia digitálnej konštrukcie realizuje automatizovanú konštrukciu hromady. V kombinácii so skutočnými inžinierskymi skúsenosťami je možné zvoliť konštrukčné parametre uvedené v tabuľke 1. Na rozdiel od konvenčných miešaných hromád, pomer vody k cementu, ktorý sa používa pre hromadu štvorosov, sa pri potopení a zdvíhaní líši. Pomer vody k cementu používaný na potopenie je 1,0 ~ 1,5, zatiaľ čo pomer vody k cementu na zdvíhanie je 0,8 ~ 1,0. Pri potápaní a miešaní má cementová kalňa väčší pomer vodného cementu a suspenzia má na pôdu dostatočný vplyv zmäkčujúci, čo môže účinne znížiť rezistenciu na miešanie; Pri zdvíhaní, pretože pôda v tele hromady sa zmiešala, menší pomer vodného cementu môže účinne zvýšiť pevnosť tela hromady.
Pomocou vyššie uvedeného procesu miešania brokov môže štvorosová hromada miešania dosiahnuť rovnaký účinok ako konvenčný proces s cementovým obsahom 13% až 18%, čo spĺňa inžinierske požiadavky na pevnosť a nepriepustnosť cemen-pôdneho miešania a v rovnakom čase prinášajú zmeny v dôsledku cementu, čo je výhodou znižovania dávky, je to, že náhradná pôda počas konštrukcie je tiež znížená. Zahrnutie nainštalované na vŕtacom potrubí rieši problém zložitej kontroly vertikálity počas výstavby konvenčných zmesí cementu a pôdy. Nameraná zvislosť tela pilotov so štyrmi osami môže dosiahnuť 1/300.
6 、 inžinierske aplikácie
Aby sa ďalej študovala pevnosť tela pilotov digitálneho mikro-pertubovania DMP, ktorá sa miešala hromada štvorosov, a vplyv procesu tvorby pilotov na okolitú pôdu, experimenty v poľnom sa uskutočňovali v rôznych stratigrafických podmienkach. Sila vzoriek cementu a jadra pôdy merané v 21. a 28. dňoch odoberaných vzoriek zmesa hromadného jadra dosiahla 0,8 MPa, čo spĺňa požiadavky na cementu a pevnosť pôdy v konvenčnom podzemnom inžinierstve.
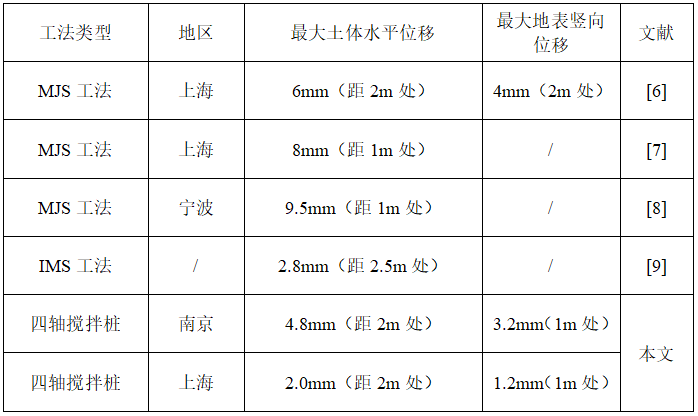
V porovnaní s tradičnými hromadami miešania cementu a pôdy, bežne používané všestranné vysokotlakové prúdové šliapanie (MJS Method) a mikro-distribančné hromady (metóda IMS) môžu významne znížiť horizontálne vytesnenie okolitej pôdy a povrchového osídlenia spôsobeného konštrukciou hromady. . V inžinierskej praxi sa vyššie uvedené dve metódy uznávajú ako techniky výstavby mikro-debrancie a často sa používajú v inžinierskych projektoch s vysokými požiadavkami na okolitú ochranu životného prostredia.
Tabuľka 2 porovnáva monitorovacie údaje o okolitej deformácii pôdy a povrchu spôsobenej digitálnym mikro-pertubujúcim DMP digitálnym mikro-osi štvorosovou hromadou, metódou výstavby MJS a metódou výstavby IMS počas procesu výstavby. Počas procesu výstavby mikro-perturbácie môže byť štvorosová hromada miešania, vo vzdialenosti 2 metrov od tela pilotov, vodorovné posunutie a vertikálne zvýšenie pôdy môžu byť riadené na asi 5 mm, čo je rovnocenné s metódou výstavby MJS a metóde konštrukcie IMS a môže dosiahnuť minimálne porušenie pôdy okolo pile počas konštrukcie PILE.
D Kombinácia výskumnej a vývojovej a inžinierskej aplikácie štvorosovej technológie miešania hromady pilotov bola kompilovaná „technická norma pre mikro-disrbsenu štvorosovú hromadu“ (T/SSCE 0002-2022) (Šanghajský štandard skupiny Society Society Group Standard), ktorá zahŕňa vybavenie, dizajn, konštrukciu a testovanie atď.

Čas príspevku: sep-22-2023